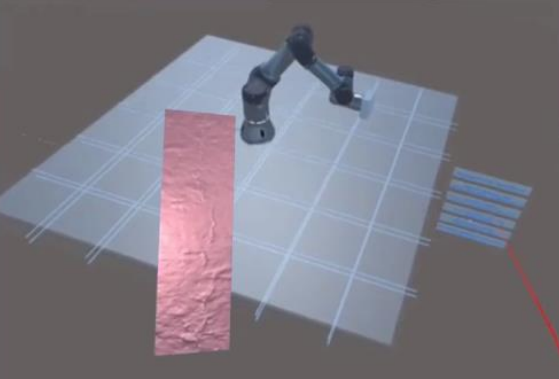
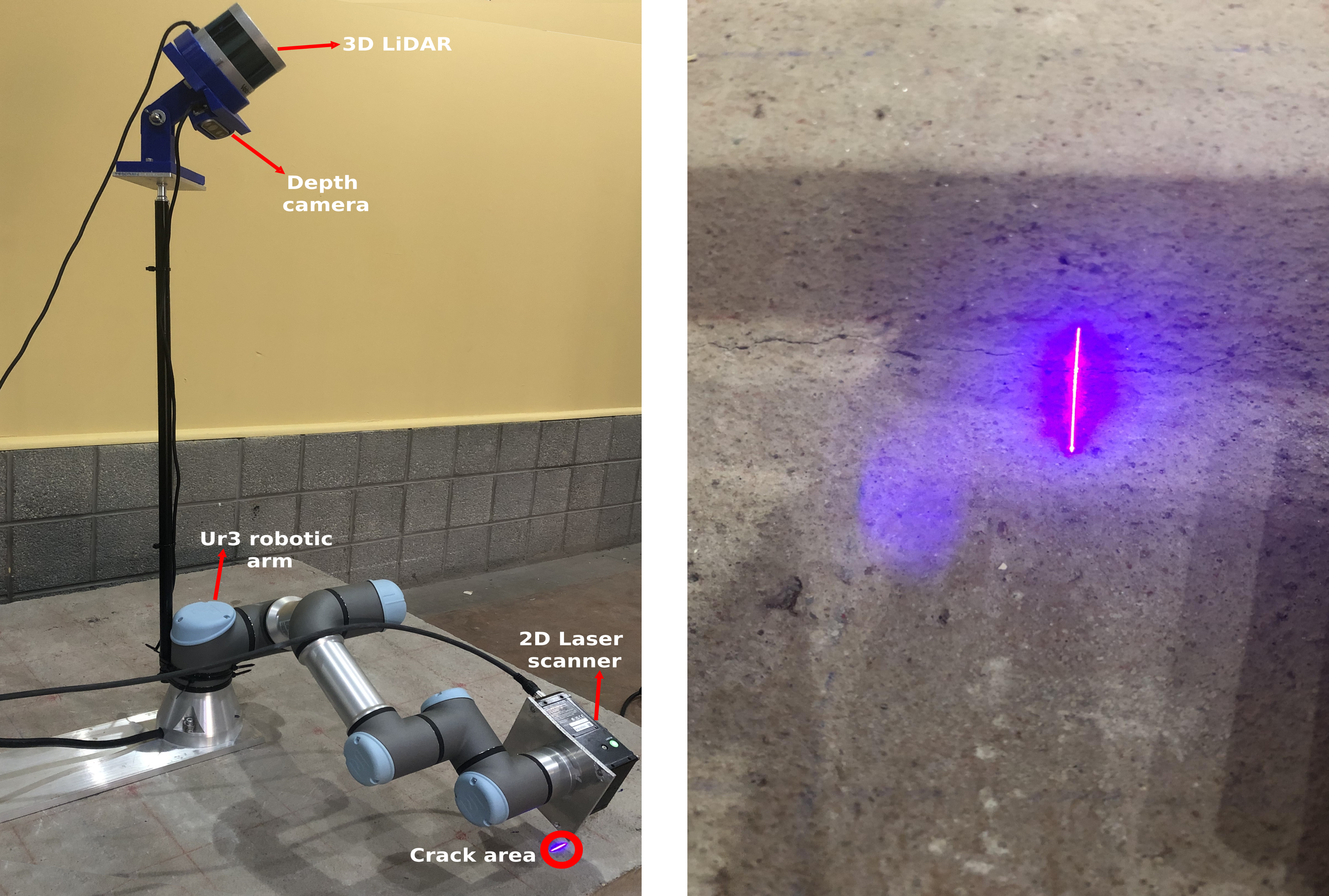
This work introduces a real-time Unity–ROS framework for immersive robotic non-destructive evaluation. The system includes Infrared Thermography, Ultrasonic Surface Waves and High Resolution Laser Scanner with the UR3 platform, that enables spatial visualization, remote inspection, and multi-modal defect analysis in both virtual and physical environments.